


Első hallásra kicsit furán hangzik a 40km az új drónosok körében, nem mai keletű dolog, korábban is voltak elérhető rádiós rendszerek amelyek akár az említett hatótávot is elérték. Ám a közelmúltban olyan rádiótechnikai eszközök jelentek meg a piacon, amik széleskörben elérhetővé tették ezt a teljesítményt mindamellett, hogy elérhető áron kínálták a terméküket, itt integrált áramkörökre (SX127x és SX1280 ic-k) és RF apróságokra kell gondolni. Erre épült a Crossfire technikája, ami nem kimondottan opensource és az ára sem feltétlenül kedvező, de rendkívül megbízható nagy hatótávú rendszer. Emellett jelent meg pár tag akik megírták a saját firmware-üket, nyilvánosságra hozták működését, példakapcsolást dobtak fel a netre és bárki megépíthette otthon a saját RX-TX párosát. A terveket, forráskódot és a rekord hatótávokat az alábbi linken ellenőrizhetitek:
https://github.com/ExpressLRS/ExpressLRS

A BetaFPV és az ExpressLRS közös munkájának gyümölcse az alább ismertetett távirányító modul illetve a hozzá tartozó vevők. A rendszer elérhető 900 és 2.4Ghz frekvenciákon, (A 900-as az EU-ban 868Mhz-re értendő) Én a 2.4-est választottam, fák és épületek között bujkálós felhasználásban az alacsonyabb frekvenciájú előnyösebb, mivel a 2400Mhz inkább fényterjedésre hasonlít, aminek a legkisebb falevél is útját tudja állni. Késleltetésben és frissítési sebességben viszont a 2.4-es jeleskedik, ott lényegesen nagyobb sávszélesség áll rendelkezésre, így ugyanannyi idő alatt nagyobb adatmennyiséget tud átpasszírozni az éteren. Hogy a 30-40km-es hatótávot hol fogjuk tudni kihasználni, ebbe most nem mennék bele, de mindenesetre rövidebb távon is egy stabil kapcsolatra számítok.

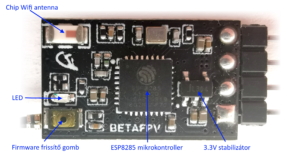
Tekintsük meg kicsit közelebbről mik vannak a vevőegységben, rögtön az egyik sarkában megtaláljuk az ipex csatlakozót, amire egy 2.4 Ghz-re hangolt dipól antenna csatlakozik, itt azonnal észre vehetjük, hogy nincs diversity képessége, tehát csak egy antenna van. A beérkező jel egy RF balun-on keresztül az AT2401-be kerül, ez egy rádiós kapcsoló, amiben van egy kis zajú erősítő vételi módhoz és egy végfokozat adó módhoz a telemetria miatt. A 2401-ből tovább megyünk az SX1280-as Semtech IC-be, ez végzi a rádiótechnikai feladatokat, erősít, konvertál, szűr, demodulál és végül digitális adatcsomagban SPI-on továbbadja a távirányítóból érkező adatokat, illetve a beérkező digitális telemetria adatokat visszaküldi a távirányítónk felé. Ehhez mindössze már csak egy mikrokontroller kell, itt egy ESP8285-re esett a választásuk, ez önmagában tudja kezelni a Wifi 802.11 BGN szabványokat, de itt elsősorban a 1280-as ic kezelésére használjuk. Ezen az oldalon van még a firmware frissítő gombunk, a ledünk, egy chip wifi antenna, és a 3.3V-os stabilizátorunk. A vevő alján találjuk meg a csatlakozási pontokat, RTVG feliratokkal, ami az RX, TX, Vin és GND-t jelöli. A vevő kizárólag 5V-ról hajtható, Crossfire protokollt használ a repülésvezérlő felé, a súlya 0.7g és 20dBm vagyis 100mW-al tud visszafelé telemetriázni. Szemben az adómodulunk 27dBm, tehát 500 mW, ha a telemetria lost van, akkor elméletileg vételi oldalon még 7dB tartalék van még, ami akár kilométereket is jelenthet. A vevő mellé kapunk még két átlátszó hőzsugor csövet, egy 4 pines tüskesort, némi tyúkbelet és magát az antennát.

Az adómodulból többféle kivitel van, én az FrSky X-Lite távba valót választottam, ezzel fogjuk tesztelni. A hátán van tehát az X-Lite-os tüskesor és a felfogatási pontok, a tetején egy SMA aljzat, ez sima SMA, tehát RP-SMA antennával nem tudjuk használni, az alján van egy USB-C aljzat, ezen keresztül tudunk firmware-ezni, a hátán találjuk a hűtőbordát, egy ledet és egy gombot, amit röviden nyomva “bind” státuszba tesszük, hosszan nyomva pedig a teljesítményt lehet módosítani, ami 100, 250 és 500mW között váltogatható. Ezek a funkciók a távirányítón futtatható “lua” scripttel is elérhetőek.
Az adómodulhoz egy sima botantennát és egy Moxon antennát kapunk, ez utóbbi egy 2.4-re hangolt hurokantenna, aminek a karakterisztikája egy félbevágott előremutató fánk alak, a távirányítónk felé kevésbé lesz hatékony, tehát ezzel az antennával kerüljük, hogy a hátunk mögé nagyobb távolságba repüljünk, mindig a gép felé nézzen az antenna.

Adómodul Bind mód
Az adómodulon a bind mód kétféleképpen érhető el, az egyszerűbb, ha a hátulján lévő fehér gombot röviden megnyomjuk, a bonyolultabbhoz már szükséges a korrekt kommunikációt kialakítani a távval, tehát external RF modult kiválasztani a modellbeállításoknál és CRSF protokollt beállítani. Ezután ha feldobtuk a távirányító memóriakártyájára az ELRS lua szkriptet, akkor azt futtatva kiolvassa a beállításokat a modulból, illetve el lehet küldeni bind módba a modult.
Vevőmodul Bind mód
Itt sem túl bonyolult a dolgunk, hiszen a korábbi gombnyomkodás helyett azt találták ki, hogy a vevő indulásánál pár másodpercig gondolkodik, majd indul a normál működés, előtte viszont figyelembe veszi hogy hányszor volt indítva csak pár másodpercig. Tehát ha 3-szor csak pár másodpercig láttuk el a vevőt tápfesszel, a harmadik indításra már bind módba megy. Ez akkor hasznos, ha a vevő mélyen be van építve, nincs hely gombot nyomkodni, hanem egyszerűen csak az akksit kell rövid ideig csatlakoztatni. A Bind módot a vevő dupla villogással jelzi.
Ha mindkét eszköz bind módban van, akkor pár másodperc alatt megtalálják egymást, a távirányítón megjelennek a telemetria adatok, a vevő pedig folyamatos Led világítással jelzi a sikeres kapcsolódást. A szkript-el a távirányítón lehet állítani az adóteljesítményt, frissítési sebességet, tájékoztat az elérhető érzékenységről. Ekkor már elérhetőek az OpenTX-ben a különböző telemetria adatok, ezeket ki is pakolgathatjuk a telemetry screen-re. A következő lépésben beépítjük a kétmotoros repülőbe aztán megnézzük van e olyan stabil kapcsolata, mint egy aranylakodalmas házaspárnak.
Ha a cikkben bármilyen hibát találtok, esetleg észrevételetek van, jelezzétek bármelyik email címünkön.